
ISSN (0970-2083)
ISSN (0970-2083)
Nikolay Anatolyevich Khripach, Denis Alekseevich Ivanov, Lev Yurievich Lezhnev and Fedor Andreevich Shustrov*
Moscow Polytechnic University, 107023, Moscow, st.BolshayaSemenovskaya, 38, Russia
Received Date: 15 September, 2017; Accepted Date: 20 September, 2017
Visit for more related articles at Journal of Industrial Pollution Control
This paper presents the results of calculation studies of a free-piston Stirling engine. They were done using our proposed method of calculation, which combines adiabatic calculation of the engine's thermodynamic parameters with dynamics of the displacer and working piston oscillations. The purpose of our work is to determine the basic thermodynamic parameters of a free-piston Stirling engine, parameters of the displacer/working piston oscillation system and the range of payload changes, which collectively make it possible to create the necessary conditions for the self-oscillation process in the engine. We demonstrate the principles of determining the FPSE set point. The obtained characteristics of the self-oscillation process are the basis for development and fine-tuning of active control systems and an algorithm of the engine operation. The obtained results facilitate the choice of external load devices that would be well coordinated with the dynamic system of the FPSE. The possible load devices include power generators, pumps and compressors with linear action.
Free-piston Stirling Engine, Frequency, Damping, Self-oscillation, Linear electrical machine
This paper presents the results of calculation studies of a free-piston Stirling engine. They were done using our proposed method of calculation, which combines adiabatic calculation of the engine's thermodynamic parameters with dynamics of the displacer and working piston oscillations.
The purpose of our work is to determine the basic thermodynamic parameters of a free-piston Stirling engine, parameters of the displacer/working piston oscillation system and the range of payload changes, which collectively make it possible to create the necessary conditions for the self-oscillation process in the engine.
We demonstrate the principles of determining the FPSE set point. The obtained characteristics of the self-oscillation process are the basis for development and fine-tuning of active control systems and an algorithm of the engine operation.
The obtained results facilitate the choice of external load devices that would be well coordinated with the dynamic system of the FPSE. The possible load devices include power generators, pumps and compressors with linear action.
Now-a-days, small-scale and distributed energy generation can be considered as a reasonable and timely development of the traditional energy sector, which is characterized by large and high-power generation facilities, usually located in the areas with the highest density of electricity consumers. The structure of the traditional energy grids causes tariff growth because of unavoidable long distance transmission losses and local electricity shortages, which reduce the regional competitive value and deter investments.
Small-scale and distributed power generation can largely solve such problems by generating electricity in close proximity to the consumer.
This type of generation facilities should be based on reliable thermal engines that offer low operating costs, high fuel efficiency and low emissions.
Many researchers and experts consider engines with external feed of heat (EEFH) to be one of the promising solutions for development of power generators for small-scale, distributed and autonomous energy supply.
Using EEFH in the energy balance of existing production facilities would increase their efficiency through utilization of the waste heat produced by various technological processes. Also, the multifuel capacity of EEFH allows to use various organic fuels, including local fuels.
There are two main structural types of EEFH: engines with a drive mechanism and free-piston Stirling engines (FPSEs). The advantages and drawbacks of both EEFH types are well known (Walker and Senft, 1985).
Here we present a calculation method and results of calculation studies of an FPSE with power output of about 1 kW, designed for use in micro-generation power units (micro-CHP) for joint generation of thermal and electric energy. Important optimization parameters for this type of power plants are acoustic and vibration effects on the environment, fuel efficiency and minimal operating costs.
The success of development of an efficient FPSE depends on the accuracy of calculation studies that must be done using mathematical models of the working cycle and dynamics of the displacer and working piston oscillations.
FPSE without a mechanical connection between the displacer and the working piston is two oscillatory systems, each consisting of a mass, a spring and a damping component.
Different combinations of operational oscillation frequency and phase displacement are supported by mechanical or gas springs, which should ensure stability of the system's oscillations. Unstable oscillatory motion halts the engine or causes an undesirable piston stroke increase. The joint motion of the displacer and the working piston must also maintain a stable thermodynamic cycle.
Non-linearity of the FPSE oscillatory system is caused by losses of the working fluid pressure in the inner chambers and changes of the gas spring characteristics.
The need to create a mathematical model and do calculation studies is explained by the fact, that there are not enough dynamic models at present that would allow to simulate the operation of the FPSE in steady and transient modes and provide high accuracy in comparison with the actual characteristics of the engine.
The data that can be obtained using mathematical models at the early stages of FPSE development are sufficient to set technical parameters of an automatic engine control system. It should be borne in mind that it is not possible to create an effective FPSE control system without detailed information on the dynamic characteristics of the engine.
The computational methods for determining the operation parameters of FPSEs first appeared and began to develop in the 1970s after the W.T. Beal's invention of a free piston Stirling engine (Beale, 1969).
Numerous studies by many authors tackle the problems of FPSE modeling and design. Among other things they investigate stability and frequency characteristics of the engines.
(Urieli, 1977) presents a unidimensional model, based on differential equations of continuity, momentum, and energies of the working fluid, regenerator and walls of the heat exchanger.
(Berchowitz, 1978) proposed a development of the (Urieli, 1977) model, offering several refinements, such as using the losses caused by viscous dissipation in the working fluid. The resulting computational model allows to investigate various thermodynamic and gas dynamic processes that take place in the engine.
(Urieli and Berchowitz, 1984) developed an analytical solution based on a linearized thermodynamic model for calculating engine characteristics, which offers a good compromise between simplicity and accuracy.
(Berchowitz, 1986) presents a second-level computational model, built for preliminary design and optimization of systems and FPSEs as a whole.
Another paper (Formosa and Despesse, 2013) proposes an analytical thermodynamic model that takes into account heat losses and parameters which determine the efficiency of the heater, regenerator and cooler.
(Redlich and Berchowitz, 1985) solve problems related to linear dynamics and stability of FPSEs using fundamentals of the control theory. The analysis of stability is based on studying the roots of a characteristic equation.
The paper (Rogdakis, et al., 2004) presents a method based on integral management of FPSE dynamics. Standard management tools, including the root locus, are used to obtain fundamental information about the dynamic behavior of the system. The proposed approach allows to match the power of the FPSE with an external load, for example, a linear electric generator and various pneumatic and hydraulic devices.
(Ulusoy, 1994) presents a study of FPSE carried out using nonlinear analysis and numerical modeling. It is established that nonlinear spring stiffness, damping load and pressure losses along the heat exchange contour are sufficient to maintain stable oscillatory motion of the displacer and the working piston.
The paper (Formosa, 2011) presents a combined computational model of an FPSE, which combines thermodynamic and dynamic models with a common iterative mechanism.
The main focus of (Shrestha, 2012) is set on the study of boundary cycles in FPSE, used to model the behavior of real oscillatory systems. Numerical studies allow to determine the parameters that lead FPSEs to the Hopf instability state.
(Riofrio, et al., 2008) presents a methodology for designing an FPSE with power output of up to 1 kW. This approach is based on the system's dynamics and control theory, where the equations of state are replaced by elements of the dynamic system simulation.
(Choudhary, 2009) considers quasi-stable dynamic systems of FPSEs with alpha- and betaconfigurations and a double-action engine, which makes these systems sensitive to disturbances. This paper demonstrates a search for the solution of a dynamical system using the Hopf bifurcation.
(Begot, et al., 2013) presents an analysis of stability of an FPSE, performed using eigenvalues of the matrix used in the calculation model. The influence of operational and design parameters on the characteristics and stability of the engine has also been determined.
(Saturno, 1994) considers ideal isothermal analysis, adiabatic analysis of the Stirling cycle, and dynamic calculation of the engine. The studies were divided into experimental and analytical parts. In the course of the experimental analysis, the parameters and conditions necessary for controlling the operation of the engine were determined. It was followed by development of three nonlinear models used to predict the behavior of the engine.
(Jang, et al., 2016) proposes a new method for determining physical parameters of an FPSE running at a given frequency. According to the method, the engine's dynamics is described as a transfer function with a feedback mechanism and a simplified Nyquist stability criterion is used to determine the operating conditions of the engine.
(Sim and Kim, 2015) demonstrates a method for determining the performance of an FPSE, based on a linear and nonlinear dynamic analytical models, which takes into account external load on the engine. Linear analysis in this paper utilizes the root locus technique, and is used to determine the FPSE set point.
(Sim and Kim, 2016) presents a method for estimating the damping coefficients, using calculated models of linear and nonlinear FPSE dynamics. The computational model defines the operating range of linear damping coefficients, which form the boundary cycles using a root locus.
General description of FPSE
In this paper we consider a beta-configuration FPSE, the computational scheme of which is shown in (Figure 1). The displacer and the working piston (WP) of mass md and mp , respectively, are moving elements of the engine.

Figure 1: Computational scheme of an FPSE.
The engine has an internal space filled with the working fluid, which is divided into 5 chambers: the compression Vc and expansion Ve chamber and other chambers formed by the elements of the heat exchange circuit, which includes a heater Vh, a regenerator Vreg and a cooler Vk. There are 2 extra chambers forming the gas spring (GS) of the displacer and the buffer chamber (BC) of the working piston. The displacer and the working piston (WP) have no mechanical contact with each other and oscillate in the internal space of the engine.
The displacer and the WP move together due to the action of inertia forces, gas springs and the pressure difference between the compression and expansion chambers.
The working piston of the engine is connected to a linear electrical machine (LEM), which creates an external load on the engine and generates electricity.
Calculated dependencies
The linearized mathematical model is based on the data presented in (Urieli and Berchowitz, 1984). Several assumptions have been made in the mathematical model:
-The processes inside the compression and expansion chambers are isothermal and the processes in the GS and BC are adiabatic;
-The motion of the displacer and the working piston is sinusoidal;
-The mean pressure of the working fluid inside the engine and pressure drop in the heat exchangers can be linearized;
- The regenerator is ideal;
- The working fluid flows unidirectionally;
- There are no heat losses.
It is accepted that the differential pressure Δp between the expansion and compression chambers is written as:
 (1)
(1)
Assuming that Δp is predominantly associated with damping forces in the elements of the heat exchange circuit, we make an expression:
 (2)
(2)
The basic equation of FPSE dynamics, compiled on the basis of the Newton's second law and in the view of our representation of pressure loss and damping forces, is written as follows:
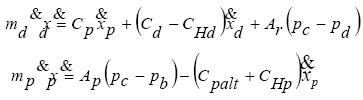 (3)
(3)
Where mp and md are the values of the displacer and WP mass;
xp and xd are the displacements of the displacer and the WP;
Ad, Ap and Ar are the cross-sectional areas of the displacer, WP and the displacer GS;
pe, pc, pd and pb are the pressure of the working fluid inside the expansion and compression chambers, in GS and BC;
Cpalt is viscous damping by the LEM;
CHp and CHd are coefficients of the viscous damping in the gas springs of the displacer and the WP.
Hysteresis losses in gas springs
Theoretical hysteresis losses Wd and Wb, which occur in the displacer GS and BC of the working piston respectively, are represented as forces of viscous damping applied to the displacer and the WP. Wd and Wb are determined using the dependencies presented in the paper (Scheck, 1988):
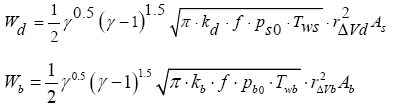 (4)
(4)
Where kd and kb are the stiffness of the GS and BC;
f is the frequency of the engine oscillation;
ps0 and pb0 are mean pressure in GS and BC;
Tws and Twb are mean temperature of the inner wall of GS and BC;
rΔVd and rΔVb are the ratio of GS and BC;
As and Ab are the average areas of the inner surface of the GS and BC.
The damping coefficients in the displacer GS - CHd and the WP buffer chamber - CHp are determined by the following dependencies:
 (5)
(5)
Where ωd and ωp are the angular velocity of the displacer and the WP;
xdmax and xpmax are the maximum displacement of the displacer and the WP.
Calculation of pressure
A linearized expression for determining the WF pressure change in the compression chamber pc during a cycle with an average WF pressure pmean is written as an abbreviated Taylor series expansion:
 (6)
(6)
Where the S parameter, which depends on the volume of internal spaces of the elements of the heat exchange circuit and the dead volume of the compression and expansion chambers, is calculated by the formula:
 (7)
(7)
Where xpc and xde are the gaps in the compression and expansion chambers at corresponding positions of the working piston and the displacer at the top extreme points;
Vh, Vreg and Vk are internal volumes of the heater, regenerator and cooler, respectively;
Th, ÃÂâreg and Tk are the WF temperature in the heater, regenerator and cooler, respectively.
In this case, the WF temperature ÃÂâreg in the regenerator is defined as a logarithmic average:
 (8)
(8)
The average WF pressure pmean during the cycle is determined taking into account the mass of WF - mg and the gas constant R:
 (9)
(9)
Pressure in the gas springs
The volumes of the displacer GS - Vd and the working piston BC - Vb change according to the adiabatic law and depend on the position of the displacer and the WP:
 (10)
(10)
Where Vd0 and Vb0 are the volumes of GS and BC in the median position of the displacer and the WP.
Based on the assumption that the motion of the displacer and the working piston is sinusoidal, the following expressions are used to determine the coordinates of the displacer - xd and the WP - xp:
 (11)
(11)
where φ is the phase displacement between the displacer and the WP.
Thus, the change of WF pressure inside the gas spring is written as:
 (12)
(12)
The stiffness values of GS - kd and BC - kb are calculated taking into account the properties of the gas used in the gas spring, which are taken into account by the specific heat ratio of the gas γ = cp/cv (Walker and Senft, 1985):
 (13)
(13)
Where pd and pb are the average pressure in the displacer GS and the working piston BC;
Vd and Vb are the average volume of the displacer GS and the working piston BC.
Pressure losses in the heat exchange circuit elements
All elements of the heat exchange circuit have internal resistance, which causes loss of pressure as the WF flows through. Determining the pressure loss requires to investigate the processes of WF motion inside the engine's heat exchange circuit.
The WF motion is caused by changes of the volume of the compression chambers Vc and expansion of Ve in time. The volumetric flow rate of WF through the heat exchange circuit is calculated as the difference between Vc and Ve :
 (14)
(14)
Despite the fact that the conditions of WF flow through the heat exchange circuit of the engine change cyclically, we use standard expressions to determine the friction loss coefficient Cf along the length of the pipeline for different values of the Reynolds criterion:
 (15)
(15)
Taking into account the head loss coefficient khL, which depends on the configuration of the flow channel, including expansions and narrowings of the channel, the pressure drop is calculated by the formula:
 (16)
(16)
Where L is the length of the calculated channel;
d is the hydraulic diameter of the channel;
ρ and u are the density and speed of the WF.
To linearize the expression (16), an equivalent linear damping parameter Ceq is introduced, which dissipates this energy due to the pressure losses.
Thus, the pressure losses, expressed through Ceq, are determined by the formula:
 (17)
(17)
In this case, the Ceq coefficient is calculated with the help of an expression that uses the maximum WF speed umax:
 (18)
(18)
The total value of the WF pressure losses in the heat exchange circuit of the FPSE is determined by the following expression:
 (19)
(19)
Where the expression to find the maximum WF flow rate, in which the indices i = h, r, k correspond to the heater, regenerator and cooler, is represented as:
 (20)
(20)
Viscous damping of the displacer and working piston
Equations (2) and (19) make it possible to compute the dependences for calculating the viscous damping coefficients of the displacer - Cd and the working piston - Cp, using the coefficient B for simplicity:
 (21)
(21)
 (22)
(22)
 (23)
(23)
The net mechanical power of the engine is determined for the angular velocity ω and the maximum WP displacement xpmax. We take into account the damping coefficient Cpalt, which simulates resistance from the LEM side, according to the following formula:
 (24)
(24)
We can calculate the electric power of the FPSE based power plant taking into account the obtained value Pm and efficiency of the available LEM.
Stiffness and damping matrix
The dynamics of the oscillatory system of the FPSE, which includes a mass, a gas spring and a damper, is written in the form of a system of differential equations:
 (25)
(25)
The stiffness coefficients K, which depends on the fixed geometric and operating parameters of the engine that remain constant throughout the engine operation, and the damping coefficients D, which depends on the pressure losses, engine frequency, stroke and phase angle between the displacer and the WP, are determined according to the following formulas (Urieli, 1984):
The main goal of our calculation studies is to solve the system of differential equations (25) and analyze the dynamics and stability of the self-oscillatory process in the FPSE.
We took the SPIKE engine (this abbreviation stands for "Sunpower 1 kW Engine") as the prototype and used its known operation parameters to simplify the calculation. The formulas presented above are used for calculation and the operating parameters of the SPIKE engine are used as the initial data (Berchowitz, 1986).
The purpose of the calculation studies is to determine the set point of the engine, where its self-oscillations are stable. The set point is determined by a complex of parameters including the mass of the displacer and WP, phase angle, thermodynamic parameters of the operating cycle and internal volume of the heat exchange circuit elements.
Determining the engine set point makes it possible to calculate the operating frequency of oscillations and the value of the LEM side damping load coefficient Cpalt. Then, the power capacity of the FPSE is computed using the Cpalt coefficient.
An iterative calculation algorithm, in which the unknown parameters are the position of the displacer and the WP, phase angle and engine's operating frequency, makes good sense for optimization of existing FPSE designs or development of new engines.
In this case, the K and D coefficients in the system of equations are first determined using a preliminary combination of engine oscillation frequency, phase angle and stroke of the displacer and WP. The calculation yields refined values of these parameters and the process is repeated until the preset value of result imprecision is reached.
Analysis of FPSE dynamics and stability is generally a linear analysis of eigenvalues of its state matrix. The purpose of the linear analysis is to determine the operating frequency of the engine oscillations with the help of a root locus, created for different values of the LEM-side damping load coefficient Cpalt. It is assumed that the external load applied to the WP from an electric generator or another mechanical device is a linear damper.
The damping processes that occur during FPSE operation are divided into internal and external processes. Internal damping is a linear damping with displacer Cd and a working piston Cp damping coefficients. It characterizes numerically the losses caused by relative motion of the WF flow between the cylinder and the pistons of the engine. External damping, which includes the damping load from electric generators or other mechanical devices, is represented in this paper by the Cpalt coefficient.
Long-time stable operation of an FPSE without any significant changes of the external load requires the displacer and WP oscillations to form a selfoscillation process, which creates internal and external conditions that support the oscillations.
In order to estimate the conditions capable of supporting the process of self-oscillation, we write a system of equations that includes a spatial matrix of states [M].
The equation of state for the dynamic system of an FPSE (25) is written in the following form:

Next, four eigenvalues of the matrix [M] are calculated, which enable us to determine the engine set point. Thus, analysis of the eigenvalues makes it possible to get an idea of the FPSE oscillations stability.
It is known that two conditions must be met to maintain the self-oscillation process.
1) The first pair of eigenvalues should be two imaginary parts of the eigenvalues in which the real part is zero. In this case, a boundary cycle is formed and these conditions define the set point of the engine's self-oscillating system.
2) The second pair of the eigenvalues must have two negative real parts, which must be large enough to ensure a shorter transient time.
The process of determining the FPSE set point consists in analyzing the eigenvalues obtained with the Cpalt coefficient, which is changed within an established range. The obtained eigenvalues enable us to plot a graph allowing to check visually the existence of the engine set point, which is the point of intersection of the limit path with an imaginary axis. In this case the real part of the eigenvalue is zero and the imaginary part is the angular velocity, used to determine the frequency of the engine oscillations.
The calculation studies determined the engine set point and the corresponding value of the Cpalt coefficient. The resulting data made it possible to calculate the oscillation frequency and mechanical power of the FPSE, which were further used in comparison with similar parameters of the SPIKE engine, chosen to evaluate the adequacy of the calculation studies.
(Figure 2) shows the root locus composed of eigenvalues from the matrix [M] while the Cpalt coefficient changes in the range of 0 to 500 (N·s)/m.

Figure 2: FPSE root locus.
The obtained eigenvalues of the state matrix [M], presented in Table 1, correspond to the self-oscillation process conditions presented earlier.
| Parameters | Calculated results | SPIKE | Discrepancy, % |
|---|---|---|---|
| Mechanical power Pm, W | 1022.3 | 1250 | 18.2 |
| Oscillation frequency f, Hz | 73.2 | 60 | 18 |
| Coefficient of damping load Cpalt, (N·s)/m | 10.75 | - | - |
| Eigenvalues | 0.01 + 459.72i; | - | - |
| 0.01 - 459.72i; | |||
| -244.25 + 288.54i; | |||
| -244.25 - 288.54i |
Table 1: Results of calculation studies
The calculation studies of the FPSE presented in this paper show that even a rather simplified version of the engine is a complex thermodynamic system.
Comparative Table 1 shows the results of the calculation studies and their comparison with the parameters of the SPIKE engine.
Stability of FPSE operation was estimated by analysis of the eigenvalues from the state matrix [M]. Evaluation of the engine performance was done using its design and thermodynamic parameters.
The values of the damping load Cpalt, obtained during the calculation studies, are included in the main technical requirements for LEM. Using the Cpalt coefficient will make it possible to choose or design a LEM, which has good compatibility with the FPSE.
Joint use of calculated data and results of experimental studies is very important for FPSE development and research. FPSE operation depends on many nonstationary and miscellaneous processes, that are often difficult to calculate in an analytical way.
The main goal of the calculation studies was to determine the engine set point, because this parameter is most important for evaluating the external and internal factors that can ensure stability of the self-oscillation process in the FPSE.
It is established that the results of the calculation have a rather high divergence from the actual parameters of the SPIKE engine. It is assumed that the divergences are caused, first of all, by the assumptions made in the calculation method and unknown WF pressures in the GS of the displacer and the buffer chamber of the WP. The calculation did not take into account the elastic connection between the engine casing and the fixed base to which the engine is mounted.
Nevertheless, the calculations demonstrate a good response of the proposed calculation method to changes in the initial data during investigation of stability of the engine oscillations.
There are different ways to refine the calculation method, including the use of empirical coefficients and dependencies obtained from the results of experimental studies of the engine. Such approach will allow for fast and accurate calculation of FPSEs of a similar configuration and comparable geometry.
In this paper we presented a method for calculating an FPSE and did calculation studies to determine the necessary conditions to maintain the self-oscillatory process of the FPSE.
The results obtained were compared with actual characteristics of the SPIKE engine and the discrepancy between the values was 18%.
The paper describes a universal method for determining the FPSE set point, which takes into account a set of engine parameters including the mass of the displacer and the WP, the volumes of the working chambers and elements of the heat exchange circuit, the pressure and temperatures of the working fluid.
The results of this work can be used in the development of FPSEs of different capacity and volumetric displacement because our calculation method accounts for a complex of engine parameters. High relevance of the presented work is confirmed by complex nature of FPSE development, especially in the absence of experimental data. It is determination of the preliminary FPSE set point that can form the basis for creation of a new FPSE. Our calculation method, which includes analysis of FPSE self-oscillation process stability, will make it possible to implement multi-parameter optimization of its systems and operating parameters.
The obtained results will also help to choose external load devices, such as linear action pumps and compressors. Moreover, the parameters of the external load will be well coordinated with the dynamic system of the FPSE.
The obtained values and the principles of determining the FPSE set point are a valuable component in the development of active FPSE control systems.
One of the directions of future development is creation of an FPSE operation algorithm and its implementation in an engine control system. This would make it possible to maintain the required phase angle and the amplitude of the displacer and working piston oscillations when the engine operates in steady and transient modes.
This article is based on the results of a research done in the framework of the grant by the President of the Russian Federation for young scientists and post-graduate students doing advanced research and development in the priority areas of modernization of the Russian economy (registration number ÃÂáÃÂß-264.2015.1) with the financial support of the Ministry of Education and Science of the Russian Federation.
Copyright © 2026 Research and Reviews, All Rights Reserved