
ISSN (0970-2083)
ISSN (0970-2083)
Bhuvaneswari A.K.1*, Thamizhsudar M1, Lakshminarayana V2
1Faculty of Department of Mathematics, Aarupadai Veedu institute of technology Vinayaka Missions University, Paiyanoor-603 104, Chennai, India
2Principal, Aarupadai Veedu institute of technology Vinayaka Missions University, Paiyanoor-603 104, Chennai, India
Received Date: 17 June, 2017 Accepted Date: 22 August, 2017
Visit for more related articles at Journal of Industrial Pollution Control
In this paper, we establish some oscillation criteria for second order neutral dynamic equation with deviating arguments of the form:
On an arbitrary time scale T. An example illustrating the main result is included.
Oscillation, Dynamic equation, Time scales, Deviating arguments
In a neutral dynamic equation with deviating arguments, the highest order derivative of the unknown function appears with and without deviating arguments. These equations find numerous applications in natural sciences and technology.
In this paper, we study the oscillatory behaviour of second order neutral dynamic equation with distributed deviating arguments of the form
 (1)
(1)
where 0 < a < b , τ (t) : T→T is right dense continuous function such that τ (t) ≤ t and  is right dense continuous function decreasing with respect to ξ,
is right dense continuous function decreasing with respect to ξ,  and 0 ≤ p(t) <1 are real valued right dense continuous function defined on T, p(t) is increasing and
and 0 ≤ p(t) <1 are real valued right dense continuous function defined on T, p(t) is increasing and  (H2): f :T × R→ R is continuous function such that uf (t,u) > 0 for all u ≠ 0 and there exists a positive function q(t) defined on T such that
(H2): f :T × R→ R is continuous function such that uf (t,u) > 0 for all u ≠ 0 and there exists a positive function q(t) defined on T such that 
A non trivial function y(t) is said to be a solution of (1) if

and

for  and y(t) satisfies equation (1) for
and y(t) satisfies equation (1) for
A non trivial solution of Equation (1) is called oscillatory if it is neither eventually positive nor eventually negative, otherwise it is called non oscillatory (Bohner and Peterson, 2001; Bohner and Peterson, 2003; Bohner and Saker, 2004; Akin, et al., 2007).
We note that if T = R we have σ (t) = t, μ (t) = 0 then equation (1) becomes second order neutral differential equation
If T = N we have σ (t) = t +1, μ (t) =1
then equation (1) becomes
For more papers related to neutral dynamic equations with distributed deviating arguments, we refer the reader to [8,9]. The books [1,2] gives time scale calculus and its applications.
Now we state and prove our main result.
Theorem 4.1
Assume that (H1) and (H2) hold. In addition, assume that rΔ (t) ≥ 0. Then every solution of Equation (1) oscillates if the inequality
 (2)
(2)
where 
and x(t) = y(t) + p(t) y(τ (t)) (3)
has no eventually positive solution.
Proof
Let y(t) be a non-oscillatory solution of Equation (1).
Without loss of generality assume that y (t) > 0 for then
then and
and for
for  From Equation (1) and (H2), we have
From Equation (1) and (H2), we have  (4)
(4)
and  is an eventually decreasing function. Now we claim that
is an eventually decreasing function. Now we claim that  eventually.
eventually.
If not, there exists a  such that
such that  then we have
then we have and it follows that
and it follows that (5)
(5)
Now integrating Equation (5) from t2 to t and using (H1) , we obtain  as t →∞, which contradicts the fact that x(t) > 0 for all 0t ≥ t . Hence r (xΔ (t)) is positive.
as t →∞, which contradicts the fact that x(t) > 0 for all 0t ≥ t . Hence r (xΔ (t)) is positive.
Therefore there is a 
 (6)
(6)
Therefore  (7)
(7)

Multiplying Equation (7) by q(t) , then 
 (8)
(8)
Integrating Equation (8) from a to b, we get
 (9)
(9)
Substituting (9) in (4) we obtain,
 (10)
(10)
Since  for some
for some
Therefore
Substituting the last inequality in Equation (10), we get
Or
which is the inequality (2).
As a consequence of this, we have a contradiction and therefore every solution of Equation (1) oscillates.
Theorem 2
Assume that (H1) and (H2) hold. In addition, assume that  is increasing with respect to t and there exists a positive right dense continuous, Δ differentiable function α (t) such that
is increasing with respect to t and there exists a positive right dense continuous, Δ differentiable function α (t) such that (11)
(11)
where  and
and  Then every solution of Equation (1) is oscillatory (Higgins, 2008; Saker, 2010; Thandapani, et al., 2011).
Then every solution of Equation (1) is oscillatory (Higgins, 2008; Saker, 2010; Thandapani, et al., 2011).
Proof
Let y(t) be a non-oscillatory solution of (1).
Without loss of generality assume that y (t) > 0 for t ≥ t0 , then  and
and
Define the function 
Then z(t) > 0 . Now
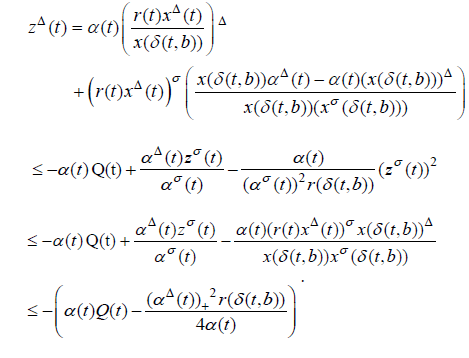
Integrating from t7 to t, we obtain

which contradicts Equation (11)
Hence the proof.
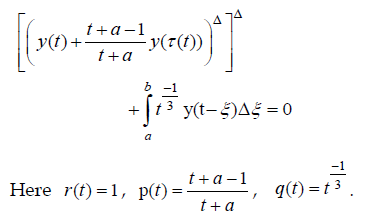
Example: Consider the following second order neutral dynamic equation (Candan, 2011; Candan, 2013).
 (12)
(12)
All the conditions of Theorem (2) are satisfied.
Now 
Taking α (s) = s , we see that
Therefore (12) is oscillatory.
Copyright © 2026 Research and Reviews, All Rights Reserved